News Story
Alum Kevin Galloway starts postdoc at University of Michigan

He is working with Professor Jessy Grizzle in the Control Systems Laboratory on developing feedback controls for stabilizing walking and running gaits for bipedal robots, a project which incorporates nonlinear control theory as well as experimental implementation with a novel bipedal robot known as MABEL.
At Maryland, Galloway served as one of the lab managers for the Intelligent Servosystems Lab and was advised by Professor P.S. Krishnaprasad (ECE/ISR).
Published October 6, 2011
Related Stories
Stories / May 6, 2020
Alumnus Kevin Galloway earns tenure at the U.S. Naval Academy

Stories / May 6, 2020
ISR/ECE alumni collaborate on control paper published in PRS-A
Stories / December 12, 2014
Workshop on Geometry of Collective Behavior organized by P. S....

Stories / July 3, 2023
ECE and ISR alumni feature prominently at American Control...
Stories / June 19, 2023
Alum Sean Andersson named Mechanical Engineering Department...
Stories / March 8, 2023
The Falcon and the Flock

Stories / February 20, 2023
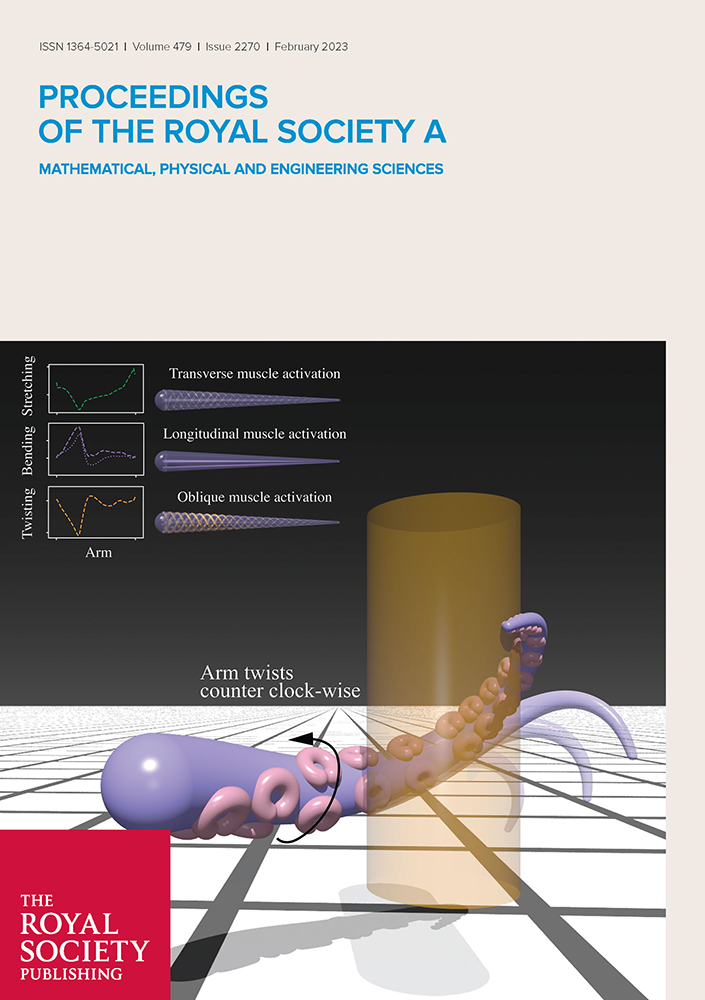
Alumnus Udit Halder’s work published as cover article in...
Stories / February 8, 2023
Levi Burner named a Future Faculty Fellow
Stories / July 30, 2021
Derek Paley's e-scooter work featured in Washington Post
Stories / February 3, 2021
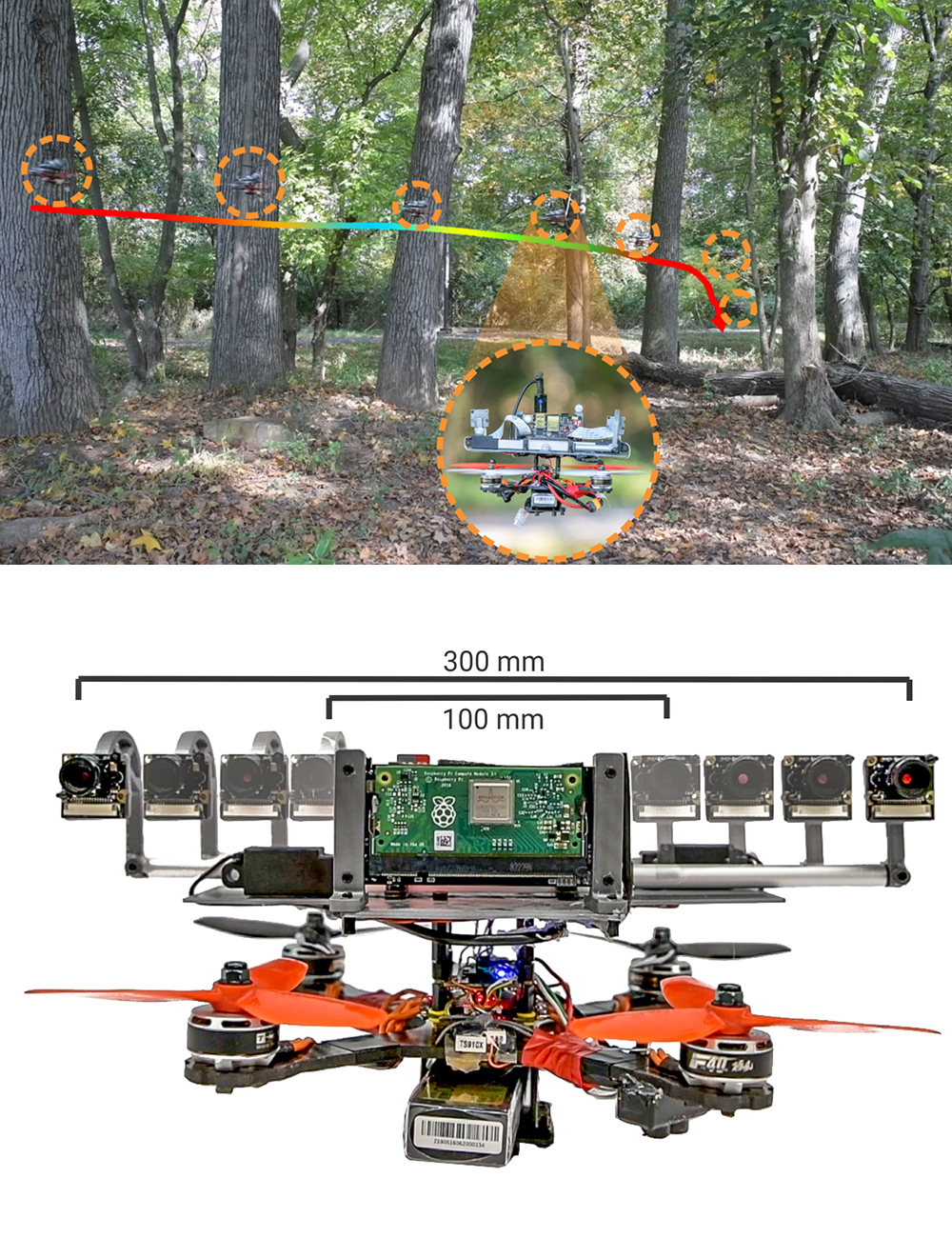
'MorphEyes' stereo camera system improves quadrotor UAV...