News Story
Robotics Course Drives Students to Succeed
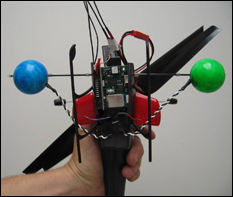
Students developed a method to control this coaxial helicopter fitted with a lightweight Inertial Navigation Unit and Bluetooth transceiver from the ground, using wireless communications from the ground robot. (Photo by Gil Blankenship/Clark School)
When students take control of their own learning, it’s amazing to see how fast we can go. Surprisingly, another benefit of the class is that I realize the importance and potential application of all the theory that I’ve learned up to this point.”
- Scott Watson, senior computer engineering major
At the University of Maryland's A. James Clark School of Engineering, undergraduate students are responding positively to a new kind of course—one that tests their problem-solving skills, ingenuity, and ability to work with one another to develop high-tech solutions in a team environment.
And the best part of all? Students enrolled in the course get to race robots that resemble small monster trucks.
Gilmer Blankenship, professor of electrical and computer engineering (ECE), is experimenting with new and innovative teaching techniques in his senior-level course, Autonomous Robotics. The course is one of the university's Capstone Design Courses, which are intended to allow students to synthesize solutions to open ended problems.
In Blankenship’s course, students work in small teams to build and program robots to compete in performing specific tasks. The robots can be described technically as autonomous mobile sensor platforms, consisting of a truck-like frame and wheels, with an onboard laptop computer, making each robot approximately 15” x 20” in size. The students can communicate with the robots using wireless links and a remote desktop application, as well as other custom applications the students design.
The emphasis of the course is on designing strategies and tactics, and programming the robots to succeed at challenging tasks, such as cooperating to pursue another robot, or racing around an obstacle course. The physical features of the robot platforms are much less important than their algorithms and software, which the student groups develop throughout the semester. To emphasize this, all of the robots are physically identical and have the same sensors to control movement.
The course is unique in that it allows students to benefit from innovations accomplished by students previously enrolled in the course. Elements of the best student designs are carried over to the next semester’s class, so new students enrolled in the course build on a canon of knowledge, and start with software systems that have been successful at one or more tasks. This requires the new students to come up to speed on software written by someone else, a common task in real-world engineering design projects, reflecting the environment that the students will ultimately find in industry or research laboratory after graduation.
“The experience has been extremely rewarding,” said Scott Watson, a senior computer engineering student enrolled in the course. “When students take control of their own learning, it’s amazing to see how fast we can go. Surprisingly, another benefit of the class is that I realize the importance and potential application of all the theory that I’ve learned up to this point.”
"The Autonomous Robotics course is a very different kind of class," said Ermin Wei, another senior enrolled in the course. "Students enjoy the opportunity to implement the theoretical frameworks they have learned on actual hardware. This enhances hands-on experiment skills as well as understanding and appreciation of theories, and sometimes even leads to new discoveries."
"And working with robots is a lot of fun," she added.
At this point the course has developed its own library of software (the Autonomous Systems Software Library) for platform control and sensor processing. New students build on this library and add features that will be used in future versions of the course. For instance, since the robots' physical features provide constraints in terms of speed, maneuverability and image acquisition, these limitations must be taken into account by the students in developing strategies, tactics, and algorithms to make their robots operate and cooperate efficiently. Learning from students who were previously enrolled in the course helps new students adapt and identify solutions to these challenges.
Blankenship has introduced new problems into the course each semester that challenge students to innovate and create solutions to problems even he admits may not be solvable. For example, last year, Blankenship asked a team of students to develop a method for a ground robot to control an unstable aerial robot, creating a mechanism for the aerial robot to hover directly over the ground robot. Amazingly, a team of his students managed to accomplish this late one evening, well after midnight. They nearly called him in the middle of the night to announce their success.
“I told them they should have called me,” said Blankenship. “I am very glad to see that the challenges in this course have inspired this kind of enthusiasm from our students.”
During the first part of the semester, the teams collaborate to solve certain basic problems, such as sensor signal processing and platform movement control, which allow the robots to sense their surroundings and regulate movement. Later in the semester, the teams work alone and use their robots in competitions that require inter-robot cooperation, distributed control and communications. A final competition at the end of the semester is used to assess overall success of the designs.
The innovative course is in keeping with the Clark School's long history of research and creative student projects and competitions in the area of robotics. It is supported by Clark School Corporate Partner and ECE Corporate Affiliate BAE Systems.
Undergraduate students enrolled in the course are mentored by volunteer graduate students who have taken the course in the past. These students maintain the Autonomous Systems Software Library and teach the library to the new students in the course. The course also has an active collaboration with a robotics group at the NASA Goddard Space Flight Center and with a team at Michigan State University. These interactions provide new challenges for the students in the course.
The public had a chance to interact with the autonomous robots on Maryland Day, a large, annual community event hosted by the university, last month. Students set up a racing challenge using the autonomous robotics technology. Visitors were invited to manually race a controllable robot versus an autonomous robot on an oval track. At the end of the day, only one visitor had actually managed to beat the autonomous robot.
View the related press release.
Published May 14, 2008
Related Stories
Stories / February 7, 2022
MRC and MAGE Earn ARM Institute Endorsement

Stories / October 23, 2025
MRC Seminar Series Starts with Jellyfish-Inspired Robotics

Stories / August 28, 2025
Passing the Torch: Maryland Robotics Center’s Next Chapter

Stories / August 14, 2025
New Research Helps Robots Grasp Situational Context

Stories / July 1, 2025
Robot-Assisted Triage: UMD Team Answers the Challenge

Stories / April 2, 2025
Tuna-Inspired Mechanical Fin Could Boost Underwater Drone Power

Stories / March 10, 2025
Developing Efficient Systems for Deep Sea Exploration

Stories / October 23, 2024
UROC Spearheads Medical Delivery Pilot Program

Stories / August 27, 2024
Inspired by Nature, Researchers Improve System Movement

Stories / November 28, 2023
UMD Team Wins IEEE IROS Best Paper Award in Agri-Robotics
